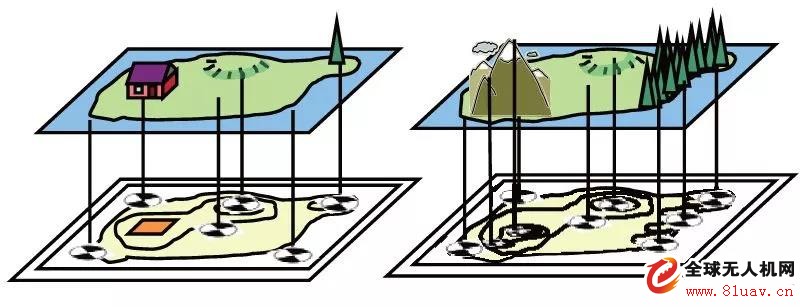
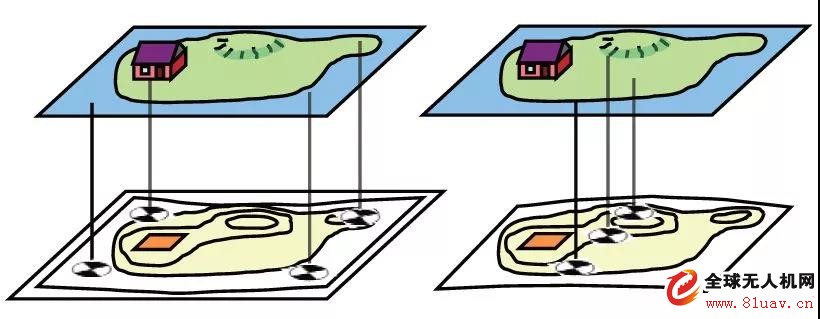
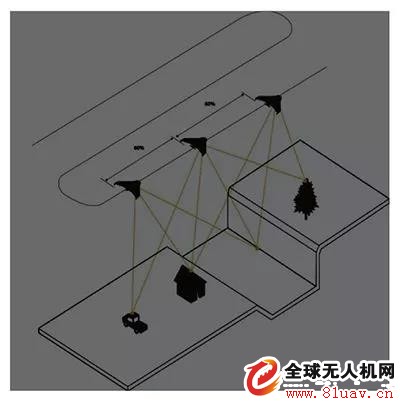
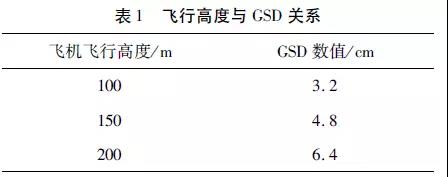
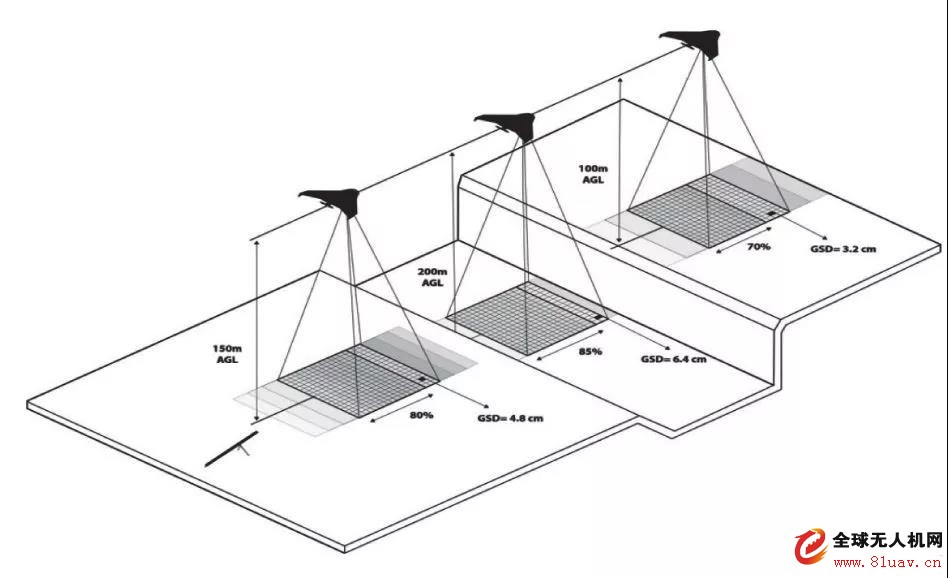
1 Overview With the development of the field of surveying and mapping, new technologies are gradually replacing traditional surveying and mapping methods. At the same time, it has brought tremendous changes to surveying and mapping workers. Among them, the most notable is the UAV mapping technology that has emerged in recent years. UAV surveying and mapping has the characteristics of flexibility, high efficiency, fastness, accuracy, low operating cost, wide application range and short production cycle. However, in the process of surveying and mapping, there are many external factors for the accuracy of data. Great impact, so while using new technology, we must also avoid the impact of these external factors on the results. 2. Factors affecting the accuracy of UAV aerial survey 2. 1 layout of image control points The layout of the control points plays a very important role in the later mapping. First, at least 5 phase control points are required for each sort. If the terrain fluctuations are large, the number of vegetation complex areas needs to be encrypted (Fig. 1). If it is not encrypted or unevenly distributed to cover the flight area, it will cause warpage (Fig. 2), and the adjustment data will not be reached. Precision requirements. Like the control point distribution correct way / map Image control point distribution error situation / map 2. 2 image quality The factors affecting image quality are divided into weather factors and camera factors; The weather factor is mainly wind and haze. When the wind speed is too high (generally Figure 2, the control point distribution error does not exceed 5), you should consider stopping the flight. First of all, the wind assembly caused the flight speed and attitude of the aircraft to change too much, resulting in the distortion of the photos taken from the air, and the final image blur. At the same time, it will accelerate the consumption of kinetic energy of the aircraft, resulting in shortened flight time, and may eventually fail to complete the planned area within a limited time. The camera itself is mainly the pixel and exposure time of the camera. The main camera itself determines that the exposure time is closely related to the weather. When the light conditions are not good, the exposure time should be increased as much as possible. The two exposure times are taken separately, and the ISO value of the camera is compared. The smaller the ISO value is, the better the photo quality is. Therefore, the exposure time corresponding to the smaller ISO value is selected (Fig. 3, Fig. 4). ISO value is 100/map ISO value is 1000/map 2. 3 overlap rate The overlap rate is an important guarantee for improving the photo connection point, but sometimes the overlap rate is lowered in order to save flight time or expand the flight area. If the overlap rate is low, each feature point will only appear in a small number of aerial images, and the amount of connection points will be small. The connection point of the photo will naturally lead to rough photo connection of the aircraft, which will eventually lead to the extraction of the connection point. The difference structure is weak (see Figure 5, Figure 6). A high overlap rate avoids the above problems. Low coincidence rate / graph High coincidence rate / graph 2. 4 flying height The flight altitude mainly affects the GSD in the flying aerial image (the actual size of each pixel). The change of the flying height will inevitably affect the amplitude of the aerial image. Taking the Tianbao UX5 as an example, the relationship between the flying height and the GSD (Table) 1, Figure 7). From the data, it can be concluded that the closer the aircraft is to the ground, the smaller the GSD value, the higher the accuracy. It has also been found that the selection of a suitable flight height in areas with large fluctuations in the ground is also important for improving accuracy. The effect of aeronautical altitude on GSD / map 3, the conclusion UAV aerial survey brings various conveniences to the field work, and there are certain requirements for foreign industry measurement. The selection of aerial survey conditions by the field industry is also an important aspect of the image measurement results of the drone. Therefore, in the field, we must pay close attention to the factors of air traffic measurement, such as phase control point layout, weather cause, flight altitude and overlap rate, so as to obtain higher Mapping results.
Nervos is an ambitious newcomer on the crypto market and Changelly has long watched it with interest. The project attracted the attention of investors and developers since its purpose is not to launch another cryptocurrency in the ecosystem. Nervos is a simple connecting database between any blockchains.
Nervos was launched in November 2019 by Nervos Network and aims to fix issues that plague both Bitcoin and Ethereum. Among them are scalability and value differences. To fix them, the Nervos team wants to implement effective scalability and raise the cost of their token by hosting other cryptocurrencies on their blockchain. Nervos supports smart contracts and is censorship-resistant. CKB is a native token of the Nervos network. It scales with the value of other assets stored on the network: the more cryptos and tokens are there, the more valuable CKB becomes. This means that this token will continue raising its value the more attention and assets it attracts. Add to that the support of smart contracts, and you have a nice crypto bridge between different blockchains. Which is exactly what makes it so attractive for both crypto enthusiasts and investors.
ckb mining machine,eaglesong algorythm,ckb miner,goldshel ck6,goldshell ck5 Shenzhen YLHM Technology Co., Ltd. , https://www.sggminer.com