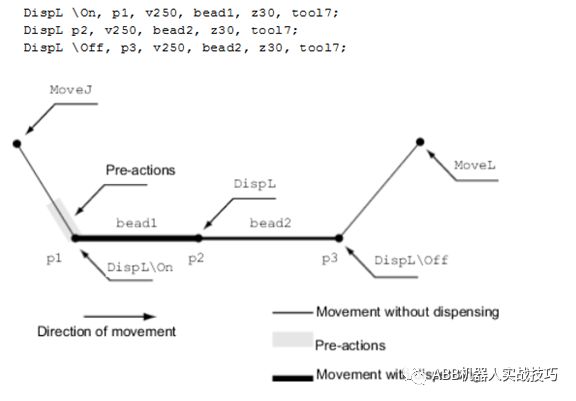
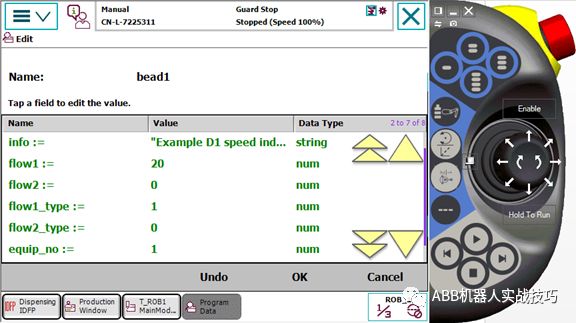
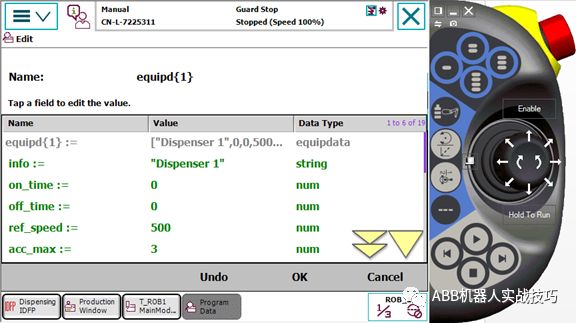
1) For glue application, ABB robots have special dispatch software and corresponding instructions 2) The main instructions are DispL and DispC, where DispL is a straight line and DispC is an arc. 3) The above is 1) The robot walks to point p1 and begins to glue 2) Use bead1 gluing parameters from P1 to p2 3) P2 to P3 use bead2 gluing parameters 4) Close the adhesive after p3 4) Bead1 parameters are as follows Flow1 is flow and flow1_type is flow, where 1 is independent of speed (ie, the speed of the robot is constant regardless of the speed of the robot), 2 is related to speed, ie, the robot's glue output will increase with the speed of the robot. Reduced speed 5) There is also a parameter for the equipdata Among them, ref_speed is the robot reference speed. If flow1_type in bead data selects 2, it depends on the speed. So if ref_speed is 500, the robot speed is actually 500, and the glue output is set to 20. If the robot's actual speed is 250 (50% of ref_speed), the glue output is actually 50%, which is 10. Our factory can produce the galvanized steel poles with various heights. Steel Lighting Pole,Steel Lamp Post,Metal Lamp Post,Metal Pole For Outdoor Lights Jiangsu Baojuhe Science and Technology Co.,Ltd. , https://www.galvanizedsteelpole.com